Cet été, des chercheurs américains ont donné des cauchemars aux arachnophobes en imaginant un manipulateur robotique d’un nouveau genre à partir d’un cadavre d’araignée (voir notre article). Une autre équipe vient de proposer un nouveau concept assez différent, mais qui aurait également sa place dans un film de science-fiction horrifique.
L’idée provient d’une équipe de chercheurs de Harvard qui travaille sur la robotique souple. C’est une discipline dont l’objectif est de s’affranchir des composants lourds, et encombrants qui limitent les capacités es robots traditionnels. À la place, les robots souples se basent sur des structures flexibles, parfois gonflables. Ils peuvent par exemple s’en servir pour se déplacer facilement sur des surfaces autrement impraticables, ou pour saisir des objets aux formes ou aux textures inhabituelles — deux exercices très compliqués pour les robots traditionnels.
C’est à cette dernière catégorie qu’appartient l’engin des ingénieurs d’Harvard. Certains seront ravis d’apprendre qu’il n’implique aucune décédée ; en revanche, il existe un lien évident avec une autre famille d’animaux aux longues extrémités : les pieuvres.
Un robot aux airs de pieuvre
Depuis la nuit des temps, ces dernières épatent les chercheurs grâce à leur dextérité incroyable. Leurs tentacules, flexibles, préhensiles et constellés de neurones, jouissent tous d’une certaine indépendance ; ce sont donc des outils à la fois extrêmement délicats, mais aussi exceptionnellement polyvalents.
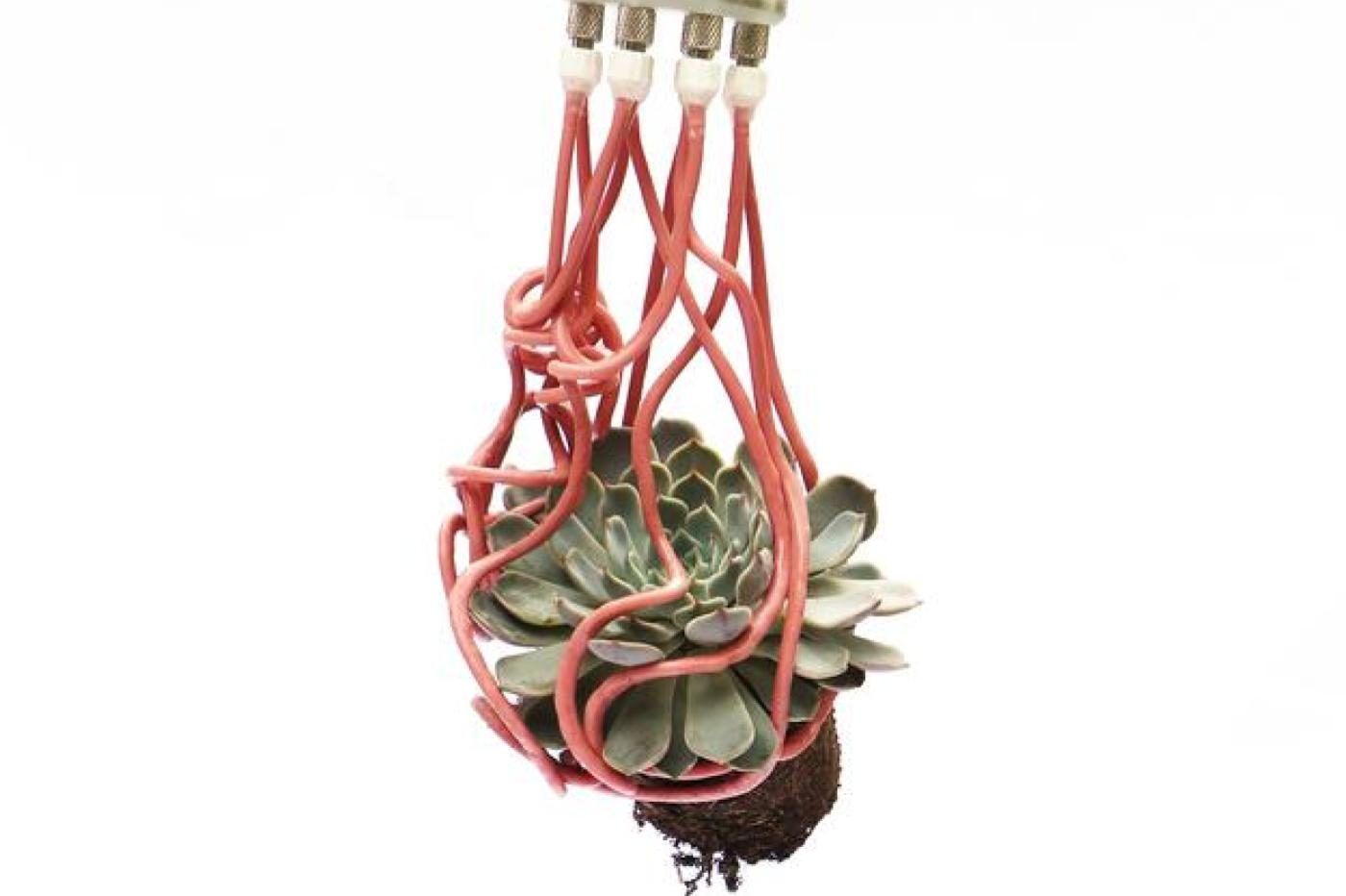
Deux caractéristiques qui font saliver les roboticiens, en particulier ceux qui travaillent sur la robotique souple comme l’équipe d’Harvard. Ils ont donc développé un nouveau type de manipulateur doté de tentacules, capable de s’emparer d’un objet en s’inspirant de la pieuvre.
Les tentacules en question sont pneumatiques, c’est-à-dire qu’ils fonctionnent grâce à un gaz compressé. Lorsqu’ils sont vides, ces manchons sont totalement inertes. Mais leur structure interne fait qu’au fur et à mesure de la montée en pression, ils s’entortillent progressivement jusqu’à s’enrouler autour de l’objet ciblé.
C’est une différence significative par rapport aux autres concepts de ce genre. En règle générale, ces appareils se basent sur des structures initialement enroulées qui se déplient avec la pression ; ici, c’est tout l’inverse. Cela signifie qu’il est possible d’augmenter la pression pour renforcer l’emprise des tentacules autour de l’objet si ce dernier commençait à glisser. Une sécurité supplémentaire qui sera bienvenue dans tous les cas. Mais ce qui rend ce concept intéressant, c’est avant tout le type d’objet dont il peut se saisir.
Un manipulateur à tout faire
Aujourd’hui, pour manipuler des objets, les entreprises utilisent souvent des systèmes basés soit sur des bras articulés, soit sur des ventouses. Et chaque approche comporte des inconvénients considérables.
Malgré les progrès incroyables de la robotique, les bras articulés ne sont pas assez délicats pour la plupart des objets très fragiles, à l’exception des modèles les plus performants. Et dans ce cas, il faut encore les programmer et les calibrer avec une grande précision pour leur permettre de saisir un objet en particulier.
L’alternative, c’est d’utiliser des ventouses ; elles peuvent opérer très rapidement sans endommager quoi que ce soit. Le problème, c’est que dans la plupart des cas, il faut avoir accès à une surface relativement plane, propre et solide. Pas de souci pour déplacer un colis ; les objets aux formes biscornues, en revanche, sont exclus d’office.
Cet appareil rassemble plusieurs de ces avantages tout en s’affranchissant de certaines limites. Il permet de maintenir fermement des objets particulièrement fragiles sans les endommager — même s’ils ont une forme non standardisée.

Quelques limites, mais de belles promesses
Son seul vrai défaut, c’est que la direction de cet enroulement est assez aléatoire ; cela signifie qu’un tentacule individuel peut très bien s’enrouler autour de lui-même. En multipliant le nombre d’appendices, il est possible de capturer l’objet ciblé presque à tous les coups. Mais il existe quand même une probabilité que l’objet rate sa cible; inacceptable sur une chaîne de production. Et même s’il parvient à l’attraper, en contexte industriel, il est souvent important de pouvoir la reposer précisément. C’est malheureusement assez compliqué d’y parvenir avec cet engin à cause de l’enroulement chaotique des tentacules.
Mais il y a quand même de quoi être très enthousiaste quant aux perspectives d’avenir de ces machines. Rappelons qu’il ne s’agit que d’une preuve de concept; une fois arrivées à maturité, elles pourraient aider les humains à réaliser des tâches extrêmement fastidieuses, mais trop délicates pour les robots traditionnels. Le tri des fruits fragiles en est un excellent exemple ; ils doivent être manipulés avec un grand soin pour garantir la qualité, alors que chaque objet a une forme et un poids différents — un vrai cauchemar pour certains robots, mais un jeu d’enfant pour un robot souple.
De plus, le concept de base est suffisamment simple pour être décliné à loisir. On peut imaginer des tas de modèles capables de manipuler des objets de toutes tailles, poids et formes, quel que soit le type de surface. On peut même imaginer y intégrer le concept de ventouse, voire construire des micromanipulateurs basés sur ce concept ; même si les chercheurs n’en sont pas encore à ce stade, c’est le genre d’innovation qui pourrait rapidement trouver une place dans certains laboratoires.
🟣 Pour ne manquer aucune news sur le Journal du Geek, suivez-nous sur Google et sur notre canal WhatsApp. Et si vous nous adorez, on a une newsletter tous les matins.










